



DriveSafe Free
DriveSafe is an app that monitors, scores and alerts your driving. By simply placing it in your windshield, DriveSafe processes the phone accelerometers, GPS and rear-camera to produce a complete driver evaluation and behaviour profile that can be checked either on real-time during the trip or reviewed with detail when the route has ended.
This app evaluates the phone accelerometers to detect brusqueness in your vehicles motion, processes the position in lane and the lane changes, the maximum allowed speed and number of lanes of the road(provided by OpenStreetMap), and detects the ahead vehicles and the distance/time kept to them. This allows DriveSafe to score each trip according to 7 manoeuvres: accelerations, brakings, turnings, lane-weaving, lane-drifting, overspeeding and car-following. It also rates each trip within 3 behaviour models: normal, drowsy and aggressive.
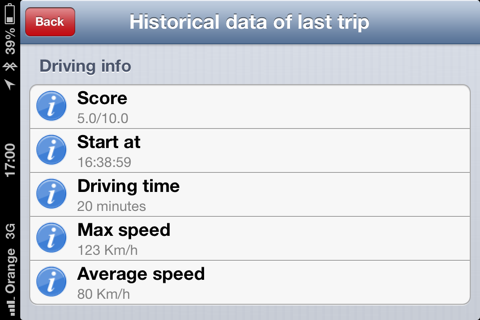
An augmented reality interface allows you to enhance the trip experience and improve your driving by obtaining feedback of your behaviour. You can also disable augmented reality by switching to an interface that shows you any of the scores and the behaviour ratios on real-time. All the information is also available to the user after the trip has ended, including map views with the info, location and risk of the different performed manoeuvres, together with automatically recorded videos of the dangerous ones.
DriveSafe also produces a series of alerts during driving (sounds and interface signs) which otherwise would be only available in premium vehicles: sudden inertial events (accelerations, brakings turnings), lane changes (normal or irregular), prolonged zig-zag behaviour, overspeeding, and close car-following (tailgating).
Our app works with any vehicle and in adverse weather conditions like severe raining, or at night (vehicle detection performance might be reduced with lack of light). Additionally, our app is privacy-friendly and it only uses the rear camera (aiming the road) to analyse the route, without taking any image from the front camera that aims the interior of the vehicle.